




Feldbus-Schrittmotortreiber mit geschlossenem Regelkreis ECT42/ ECT60/ECT86


Produkteinführung



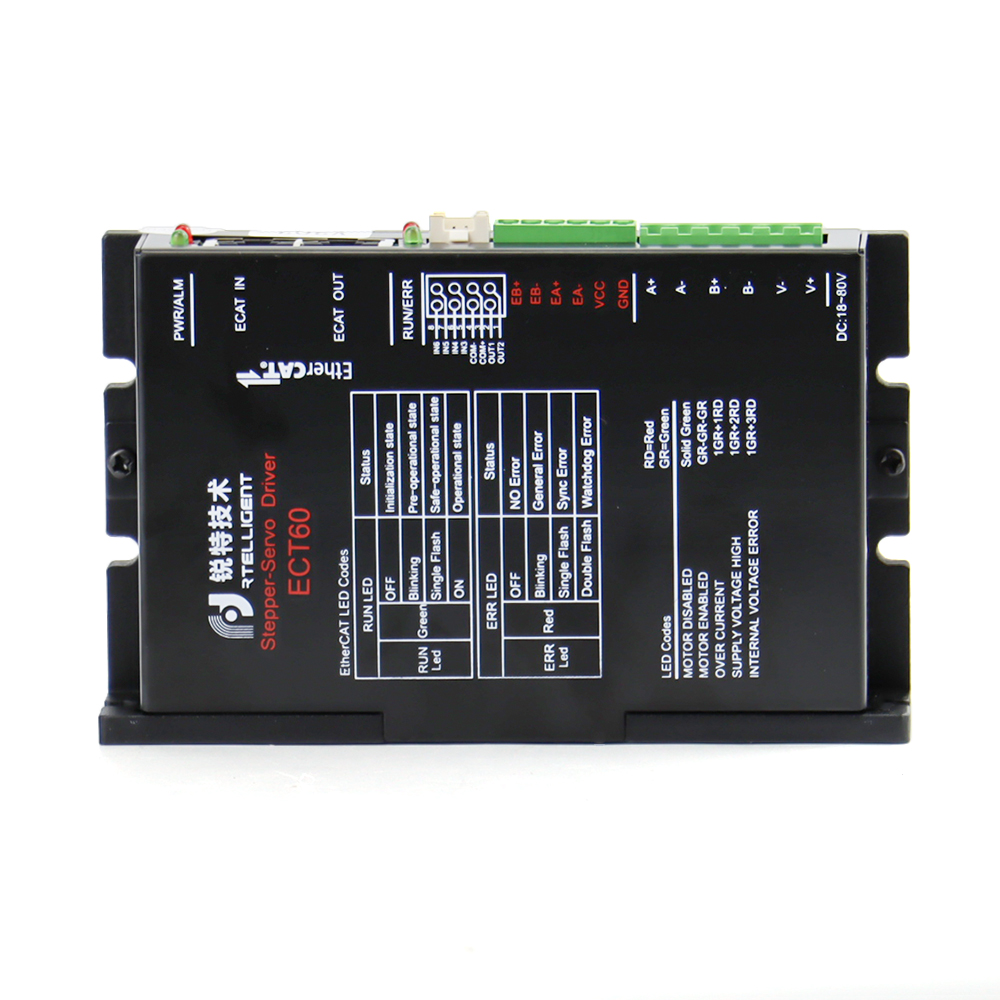
Verbindung

Merkmale
• Unterstützt CoE (CANopen über EtherCAT) und erfüllt die CiA 402-Standards
• Unterstützt CSP-, PP-, PV- und Homing-Modus
• Die minimale Synchronisierungsperiode beträgt 500 µs.
• Zweifacher RJ45-Anschluss für EtherCAT-Kommunikation
• Regelungsmethoden: Open-Loop-Regelung, Closed-Loop-Regelung / FOC-Regelung (Unterstützung der ECT-Serie)
• Motortyp: Zweiphasenmotor, Dreiphasenmotor;
• Digitaler E/A-Anschluss:
4 optisch isolierte digitale Signaleingänge: IN 1, IN 2 ist der Encoder-Eingang; IN 3 bis IN 6 ist ein 24V-Single-Ended-Eingang, gemeinsame Anodenanschlussmethode;
2 Kanäle optisch isolierte digitale Signalausgänge, maximale Toleranzspannung 30 V, maximaler Ein- oder Ausschaltstrom 100 mA, gemeinsame Kathodenanschlussmethode.
Elektrische Eigenschaften
| Produktmodell | ECT42 | ECT60 | ECT86 |
| Ausgangsstrom (A) | 0,1–2 A | 0,5–6 A | 0,5~7A |
| Standardstrom (mA) | 450 | 3000 | 6000 |
| Versorgungsspannung | 24–80 V DC | 24–80 V DC | 24–100 V DC / 24–80 V AC |
| Passender Motor | Unter 42 Basis | Unter 60 Basis | Unter 86 Basis |
| Encoder-Schnittstelle | Inkrementeller orthogonaler Geber | ||
| Encoder-Auflösung | 1000–65535 Impulse/Umdrehung | ||
| Eingang zur optischen Isolation | 4 Kanäle mit gemeinsamer Anode und 24 V Eingang | ||
| Optischer Isolationsausgang | 2 Kanäle: Alarm, Bremse, Position und allgemeiner Ausgang | ||
| Kommunikationsschnittstelle | Zwei RJ45-Anschlüsse mit LED-Anzeige für die Kommunikation | ||
-
 Rtelligent ECT-Serie Benutzerhandbuch
Rtelligent ECT-Serie Benutzerhandbuch



