

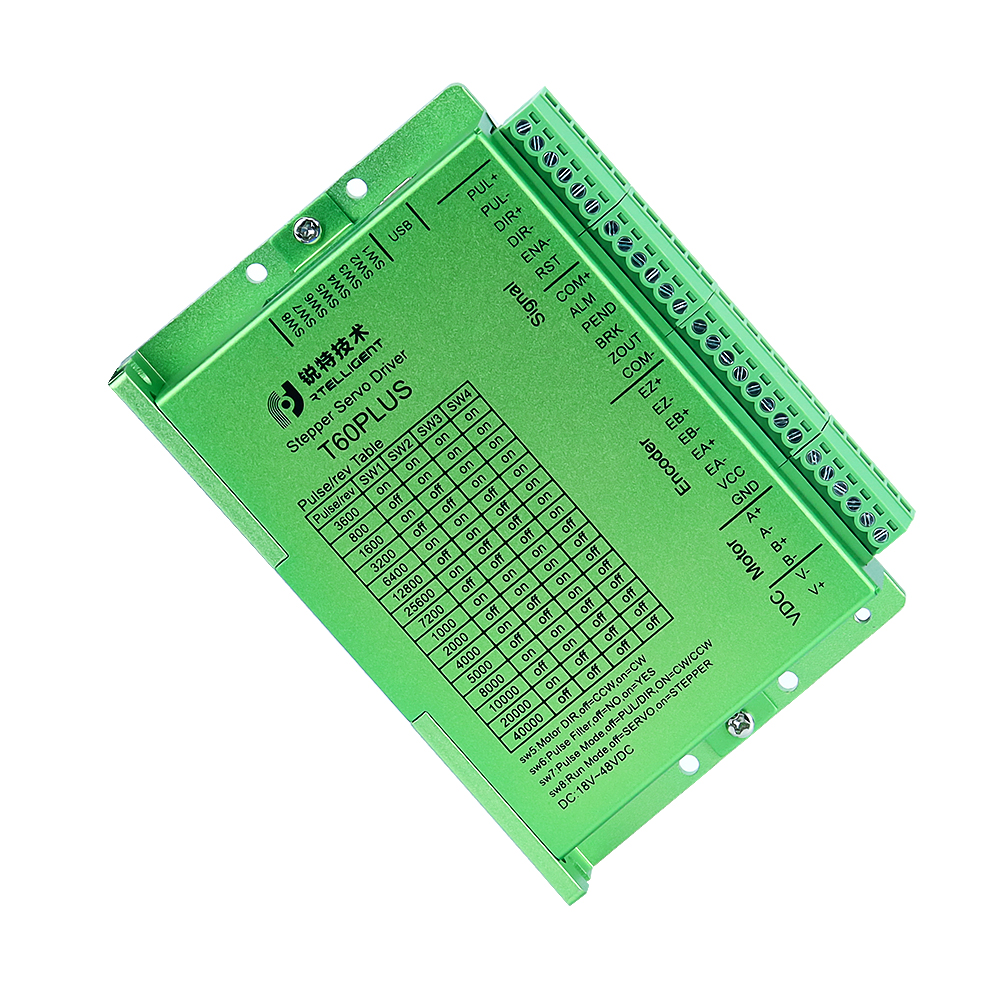


Pulsgesteuerter 2-Phasen-Schrittmotortreiber mit geschlossenem Regelkreis T60Plus


Produkteinführung



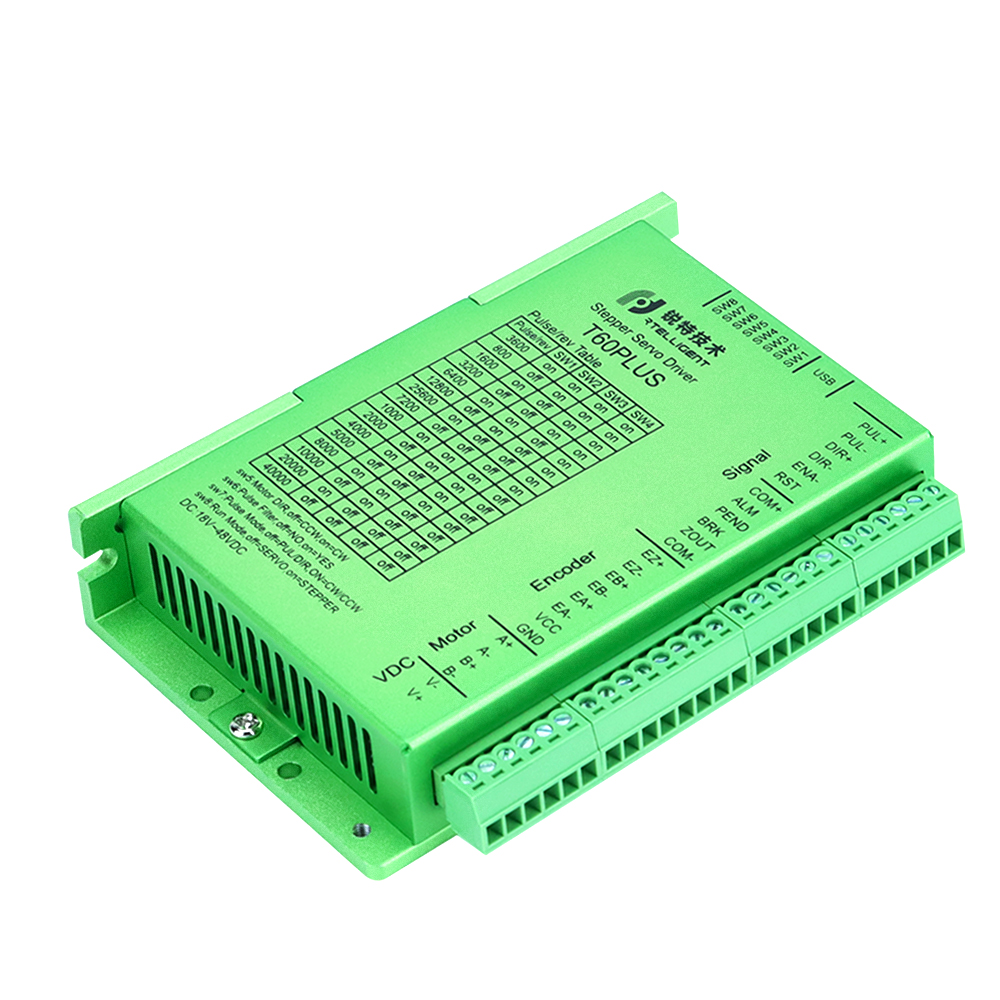
Verbindung

Merkmale
| Stromversorgung | 18–48 V DC |
| Kontrollgenauigkeit | 4000 Impulse/r |
| Pulsmodus | Richtung & Impuls, CW/CCW-Doppelimpuls, A/B-Quadraturimpuls |
| Stromsteuerung | Servo-Vektorregelungsalgorithmus |
| Unterteilungseinstellung | DIP-Schaltereinstellung, 15 Optionen (oder Einstellung über Debugging-Software) |
| Geschwindigkeitsbereich | Konventionell 1200–1500 U/min, bis zu 4000 U/min |
| Resonanzunterdrückung | Automatische Berechnung des Resonanzpunktes zur Unterdrückung mittelfrequenter Schwingungen |
| PID-Parameteranpassung | Debugging-Software zur Anpassung der Motor-PID-Charakteristik |
| Impulsfilter | 2-MHz-Digitalsignalfilter |
| Alarmausgang | Alarmausgang für Überstrom, Überspannung, Positionsfehler usw. |
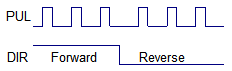
Pulsmodus
Die Signalschnittstelle des Standard-T-Serienantriebs ist pulsförmig, der T60PLUS V3.0 kann drei Arten von Impulssteuersignalen empfangen.
| Impuls und Richtung (PUL + DIR) |
|
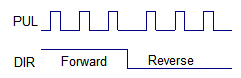
| Doppelimpuls (im Uhrzeigersinn + gegen den Uhrzeigersinn) |
|
| Orthogonaler Impuls (A/B-orthogonaler Impuls) | 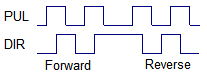 |
Mikroschritt-Einstellung
| Impuls/Umdrehung | SW1 | SW2 | SW3 | SW4 | Anmerkungen |
| 3600 | on | on | on | on | Der DIP-Schalter wird auf die Position „3600“ gestellt, und die Testsoftware kann frei andere Unterteilungen ändern. |
| 800 | aus | on | on | on | |
| 1600 | on | aus | on | on | |
| 3200 | aus | aus | on | on | |
| 6400 | on | on | aus | on | |
| 12800 | aus | on | aus | on | |
| 25600 | on | aus | aus | on | |
| 7200 | aus | aus | aus | on | |
| 1000 | on | on | on | aus | |
| 2000 | aus | on | on | aus | |
| 4000 | on | aus | on | aus | |
| 5000 | aus | aus | on | aus | |
| 8000 | on | on | aus | aus | |
| 10000 | aus | on | aus | aus | |
| 20000 | on | aus | aus | aus | |
| 40000 | aus | aus | aus | aus |
Mikroschritt-Einstellung
Laufwerksanschlüsse durchgebrannt?
1. Falls ein Kurzschluss zwischen den Klemmen vorliegt, prüfen Sie, ob die Motorwicklung einen Kurzschluss aufweist.
2. Sollte der Innenwiderstand zwischen den Anschlüssen zu groß sein, überprüfen Sie dies bitte.
3. Wenn beim Verbinden der Drähte zu viel Lötmaterial hinzugefügt wird, um eine Lötperle zu bilden.
Geschlossener Regelkreis-Schrittmotorantrieb mit Alarmfunktion?
1. Falls ein Verbindungsfehler bei der Encoderverdrahtung auftritt, stellen Sie bitte sicher, dass Sie das richtige Encoder-Verlängerungskabel verwenden, oder wenden Sie sich an Rtelligent, falls Sie aus anderen Gründen kein Verlängerungskabel verwenden können.
2. Prüfen Sie, ob der Encoder beschädigt ist, z. B. auf ein fehlerhaftes Ausgangssignal.
-
 Rtelligent T60PLUS V3.0 Benutzerhandbuch
Rtelligent T60PLUS V3.0 Benutzerhandbuch




